
|
I am a Ph.D. candidate at UC San Diego advised by Prof. Sylvia Herbert, where I am part of the Contextual Robotics Institute.
|
|
I am currently doing a research stay at Stanford University, where I am working
on automated interpretability of failures in robot foundation models for red-teaming.
|
|
|
|
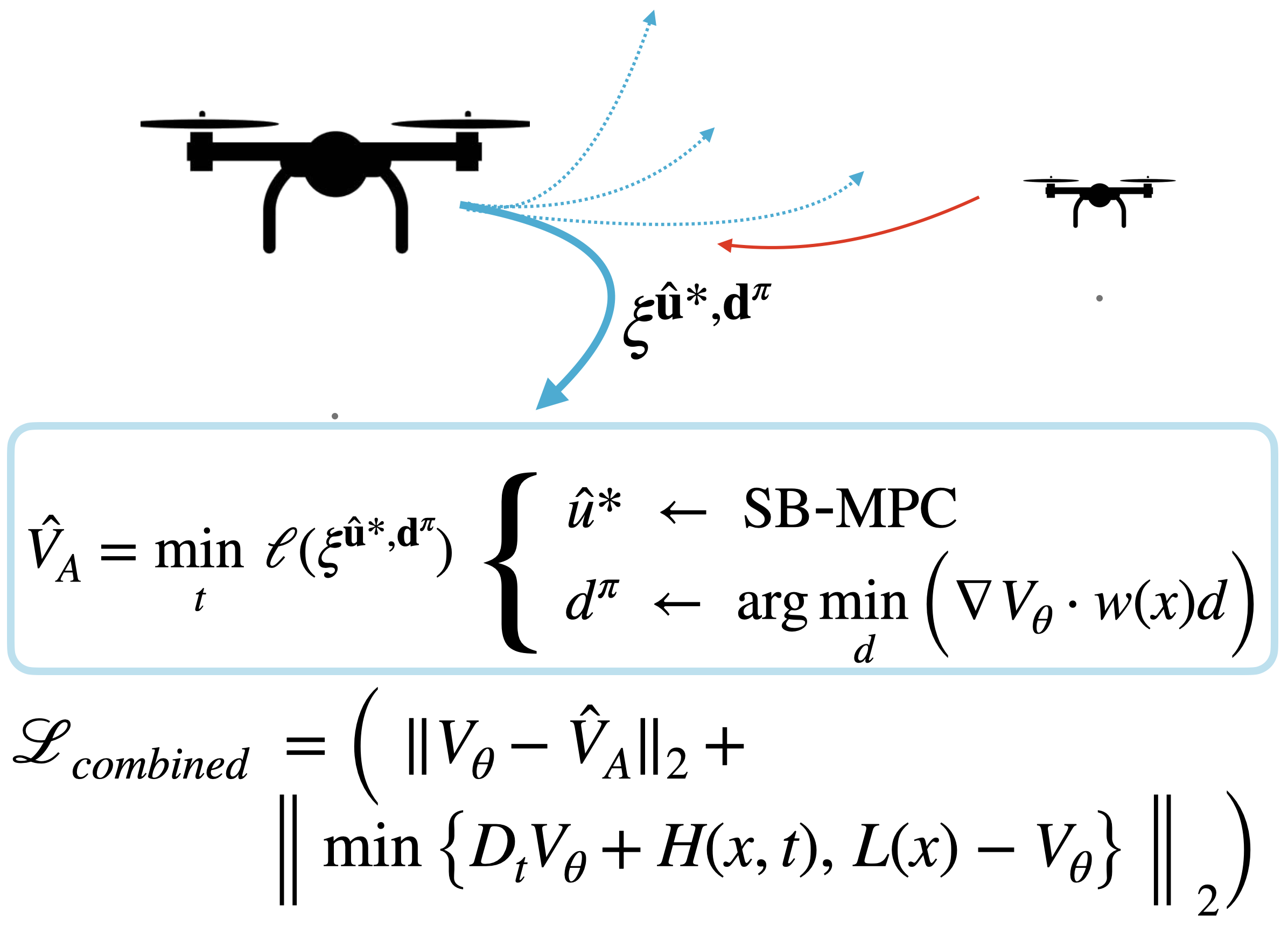
MADR: MPC-Guided Adversarial DeepReach
Ryan Teoh*, Sander Tonkens*, William Sharpless, Aijia Yang, Zeyuan Feng, Somil Bansal, Sylvia Herbert
IEEE International Conference on Robotics and Automation (ICRA), 2026. |
|
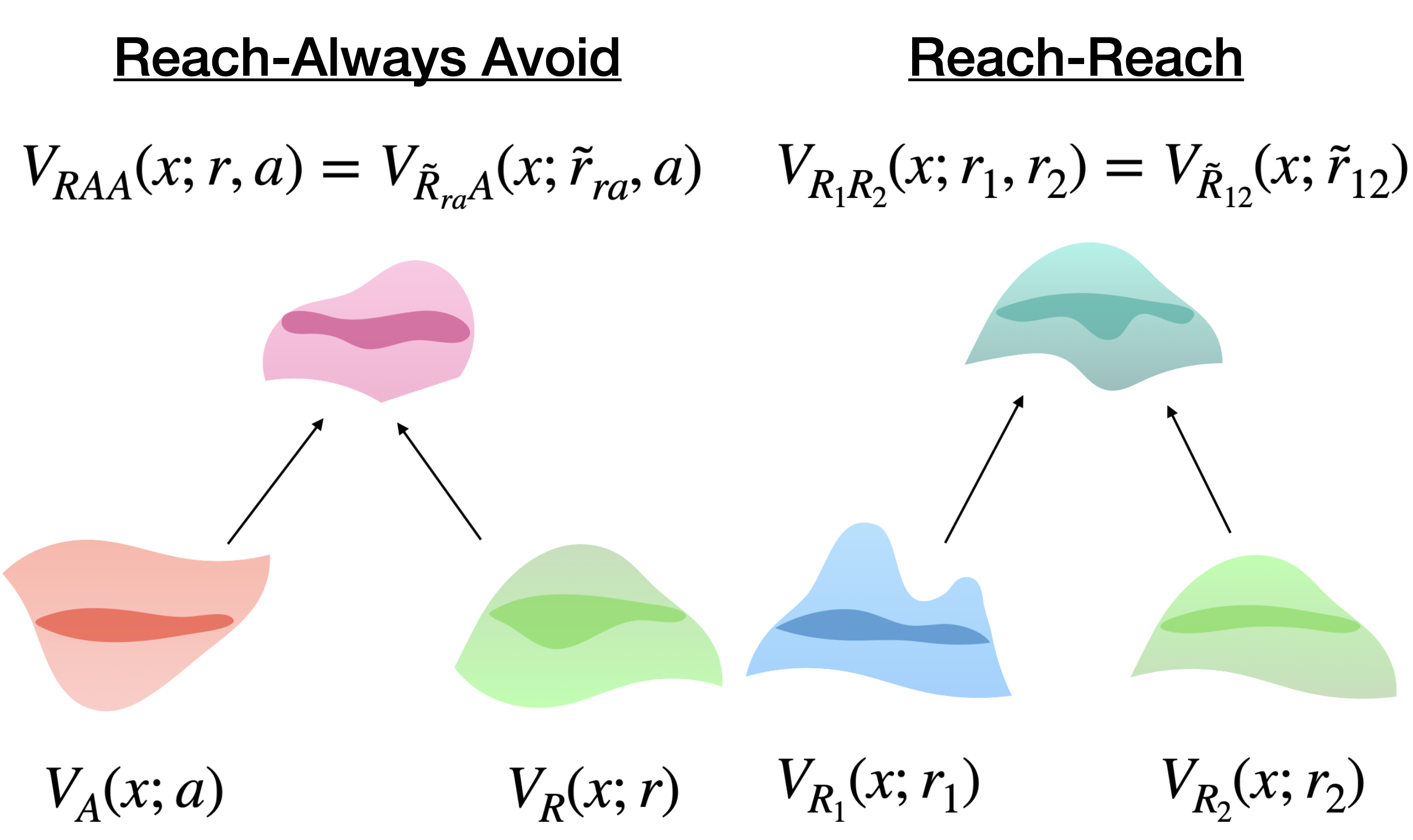
Dual-Objective Reinforcement Learning with Novel Hamilton-Jacobi-Bellman Formulations
William Sharpless, Dylan Hirsch, Sander Tonkens, Nikhil Uday Shinde, Sylvia Herbert
International Conference on Learning Representations (ICLR), 2026. |
|
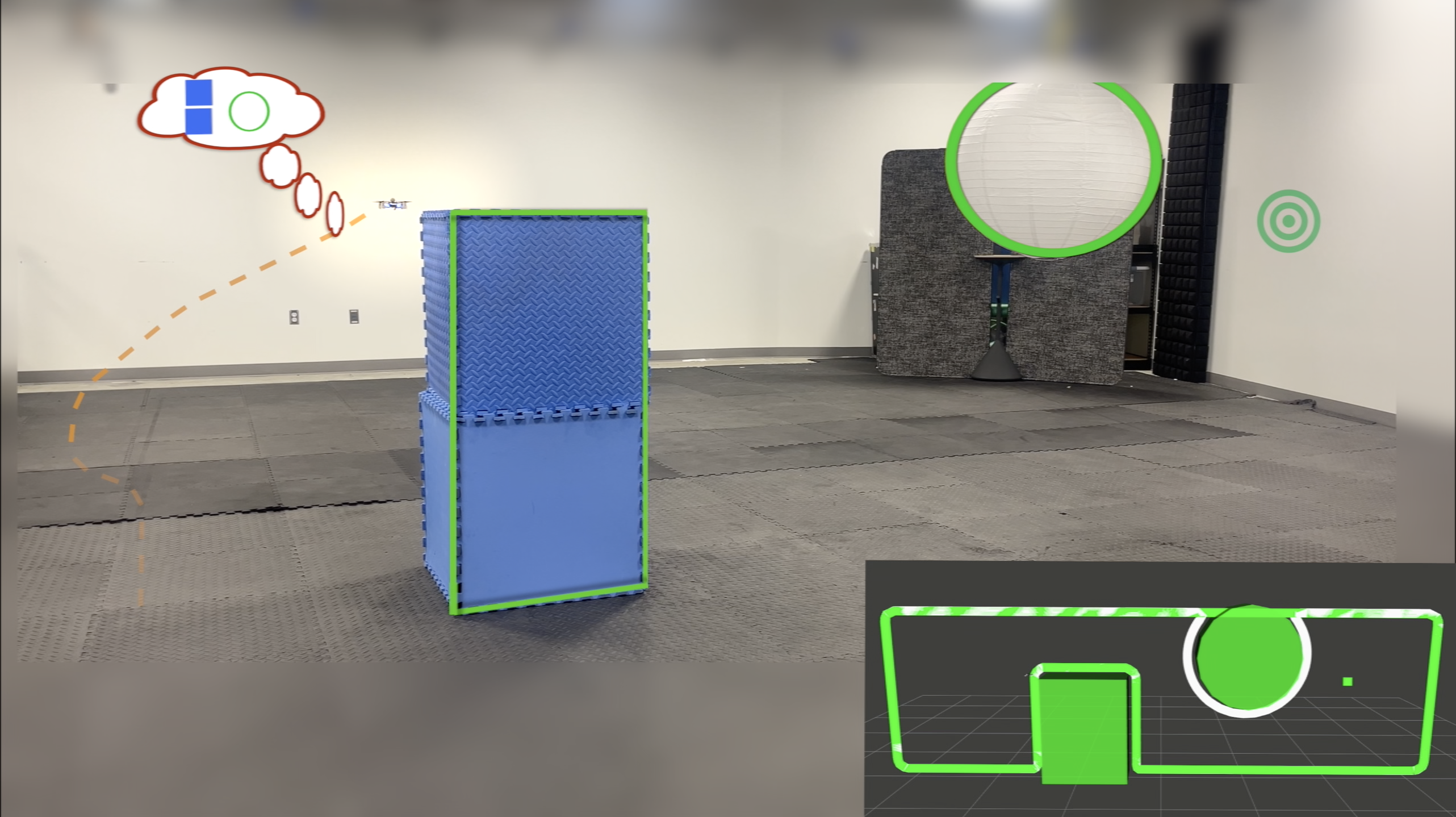
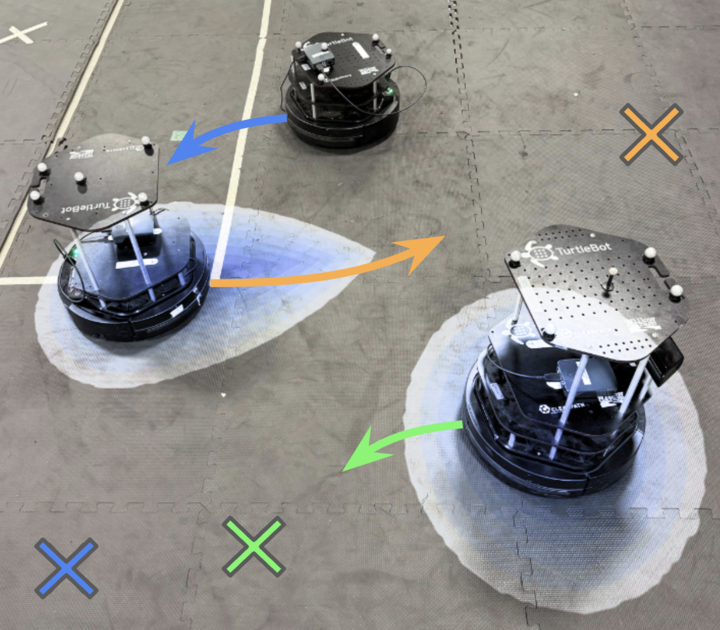
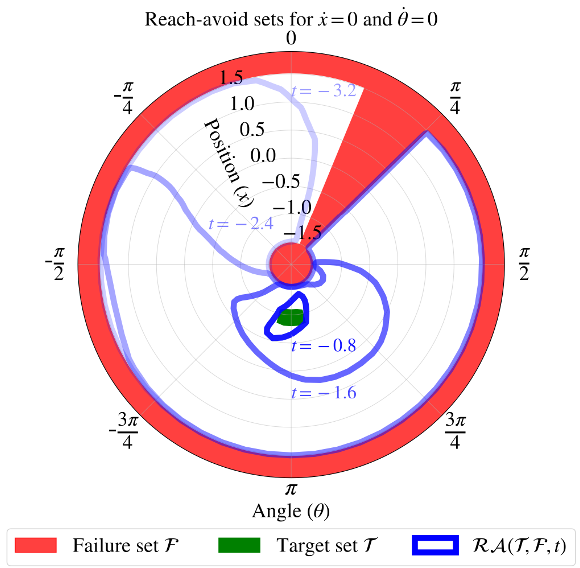
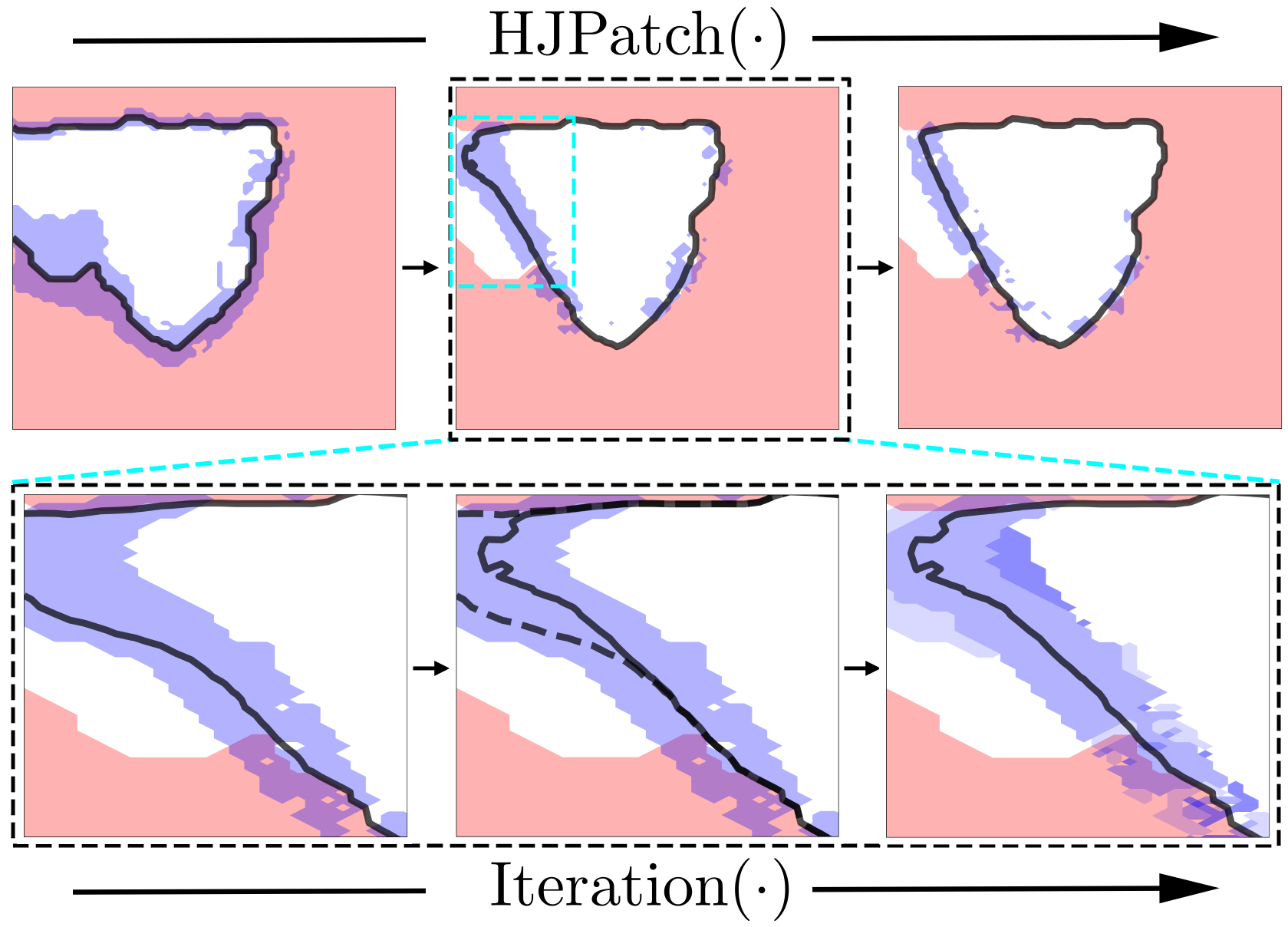
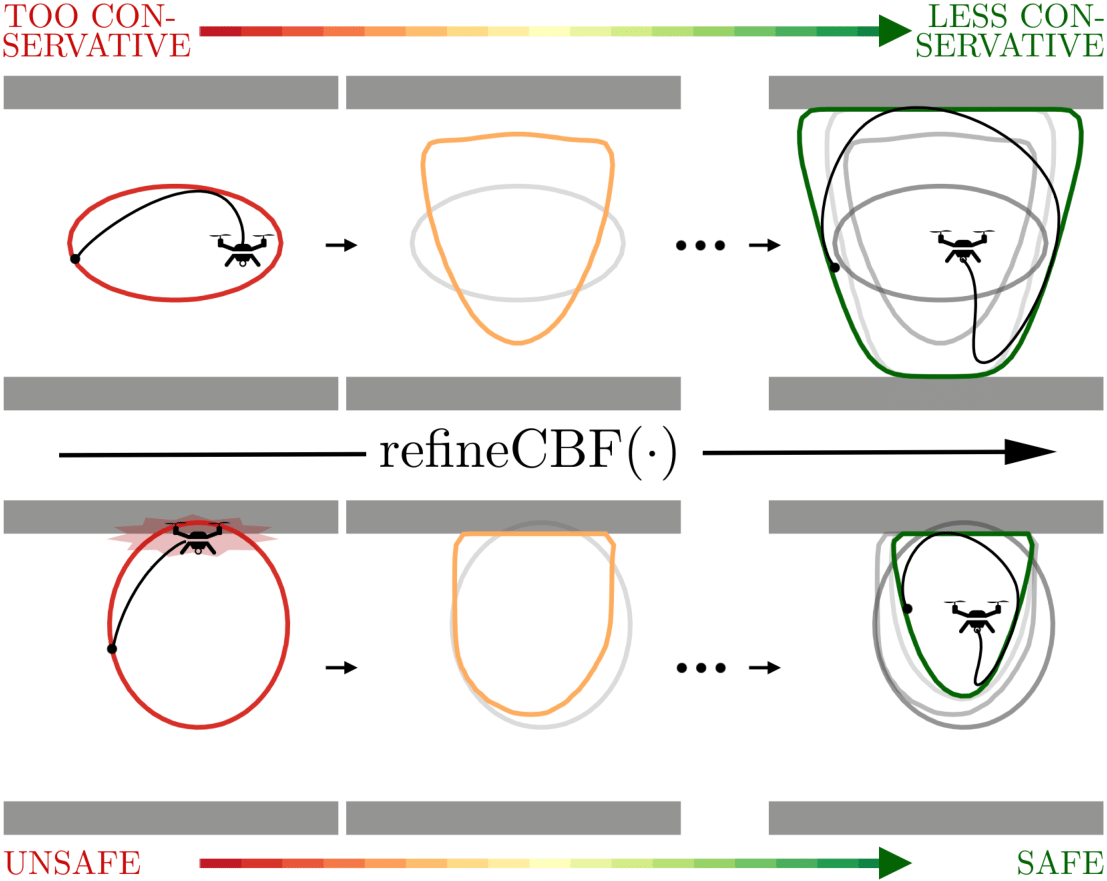
Refining Almost-Safe Value Functions on the Fly
Sander Tonkens, Sosuke Kojima, Chenhao Liu, Judy Masri, Sylvia Herbert
IEEE Transactions on Robotics, 2026. |
 |
Sander Tonkens*,
Nikhil Uday Shinde*,
Azra Begzadić*,
Michael C. Yip,
Jorge Cortés,
Sylvia Herbert
Conference on Robot Learning (CoRL), 2025. [project page] [arXiv] [1 min video] [poster] [RSS'25 OOD workshop paper] |
|
Matthew Kim,
William Sharpless,
Hyun Joe Jeong,
Sander Tonkens,
Somil Bansal,
Sylvia Herbert
2025 (Submitted). |
|
Azra Begzadić*,
Nikhil Uday Shinde*,
Sander Tonkens*,
Dylan Hirsch,
Kaleb Ugalde,
Michael C. Yip,
Jorge Cortés,
Sylvia Herbert
Learning for Dynamics & Control Conference (L4DC), 2025. |
|
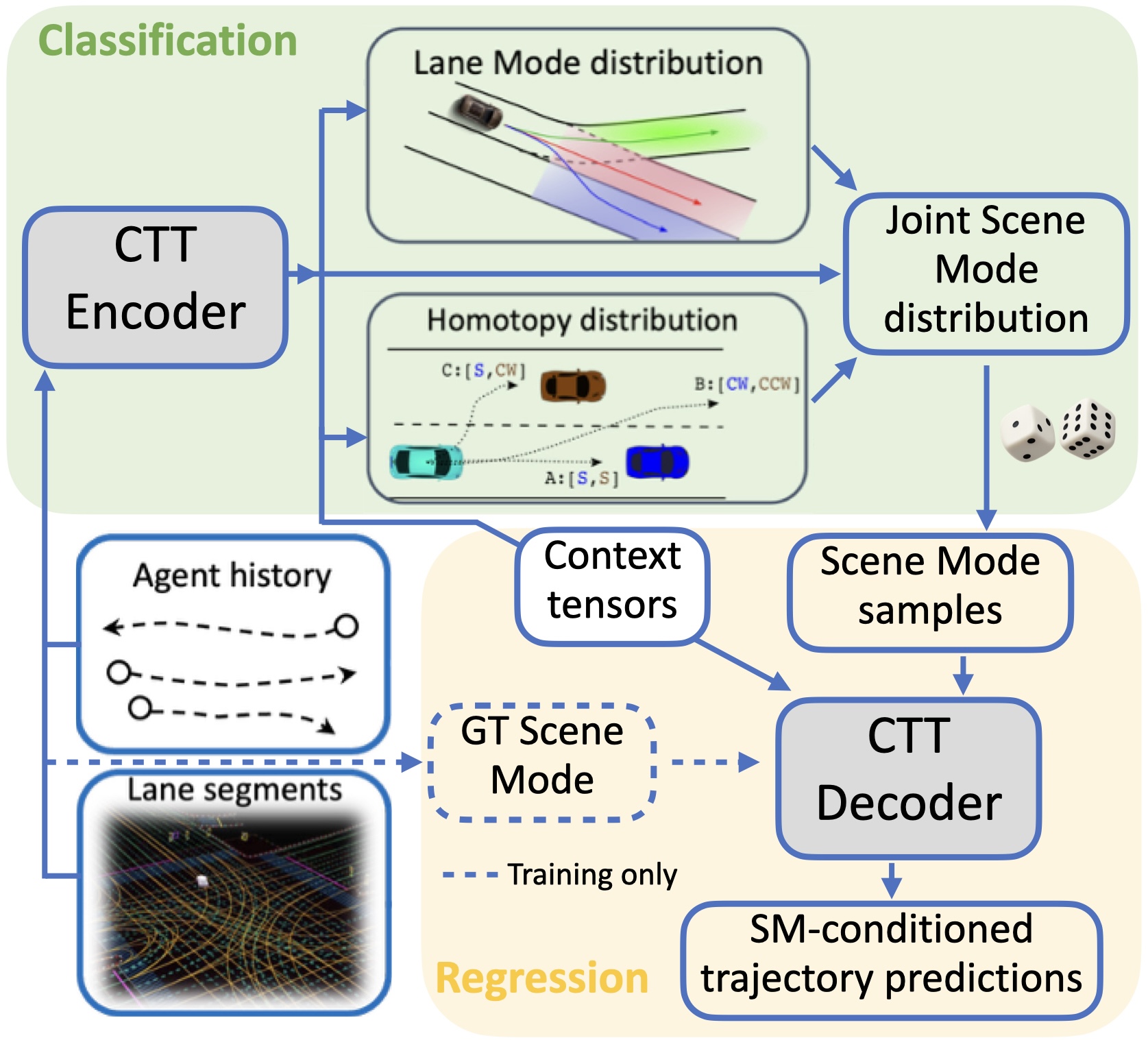
Categorical Traffic Transformer: Interpretable and Diverse Behavior Prediction with Tokenized Latent
Yuxiao Chen,
Sander Tonkens,
Marco Pavone
IEEE International Conference on Robotics and Automation (ICRA), 2025. |
 |
Sander Tonkens,
Alex Toofanian,
Zhizhen Qin,
Sicun Gao,
Sylvia Herbert
IEEE Conference on Decision and Control (CDC), 2024. |
|
Scalable Safe Long-Horizon Planning in Dynamic Environments Leveraging Conformal Prediction and Temporal Correlations
Sander Tonkens*, Sophia Sun*, Rose Yu, Sylvia Herbert
Long Term Human Motion Prediction workshop at IEEE International Conference on Robotics and Automation, 2023.
|
 |
Sander Tonkens,
Sylvia Herbert
IEEE / RSJ International Conference on Intelligent Robots & Systems (IROS), 2022. |
|
Sander Tonkens,
Paul de Klaver,
Mauro Salazar
European Control Conference (ECC), 2022. |
|
Sander Tonkens,
Joe Lorenzetti,
Marco Pavone
IEEE International Conference on Robotics and Automation (ICRA), 2021. |
|
|
|
AA203: Optimal and Learning-based Control
Stanford University Teaching Assistant (Spring 2020), under Prof. Marco Pavone Course website |
|
|
Analysis II, III & IV, Dynamics I, Physics I
École Polytechnique Fédérale de Lausanne Teaching Assistant (2015 — 2017) for various undergraduate courses EPFL ME B.Sc. Syllabus |
|
|
 |
Doctor of Philosophy (Ph.D.) in Mechanical and Aerospace Engineering
University of California, San Diego September 2021 — April 2026 (expected) |
| |
Master of Science (M.S.) in Mechanical Engineering
Stanford University September 2018 — December 2020 |
| |
Bachelor of Science (B.Sc.) in Mechanical Engineering
École Polytechnique Fédérale de Lausanne September 2014 — July 2017 |
|
Feel free to contact me regarding my research—I am always happy to brainstorm and share my ideas. I can be contacted directly at sandertonkens [at] gmail [dot] com. You can also schedule a meeting directly through my calendar. |
| Credits to Jon Barron for the great template! Last updated in May 2025. |